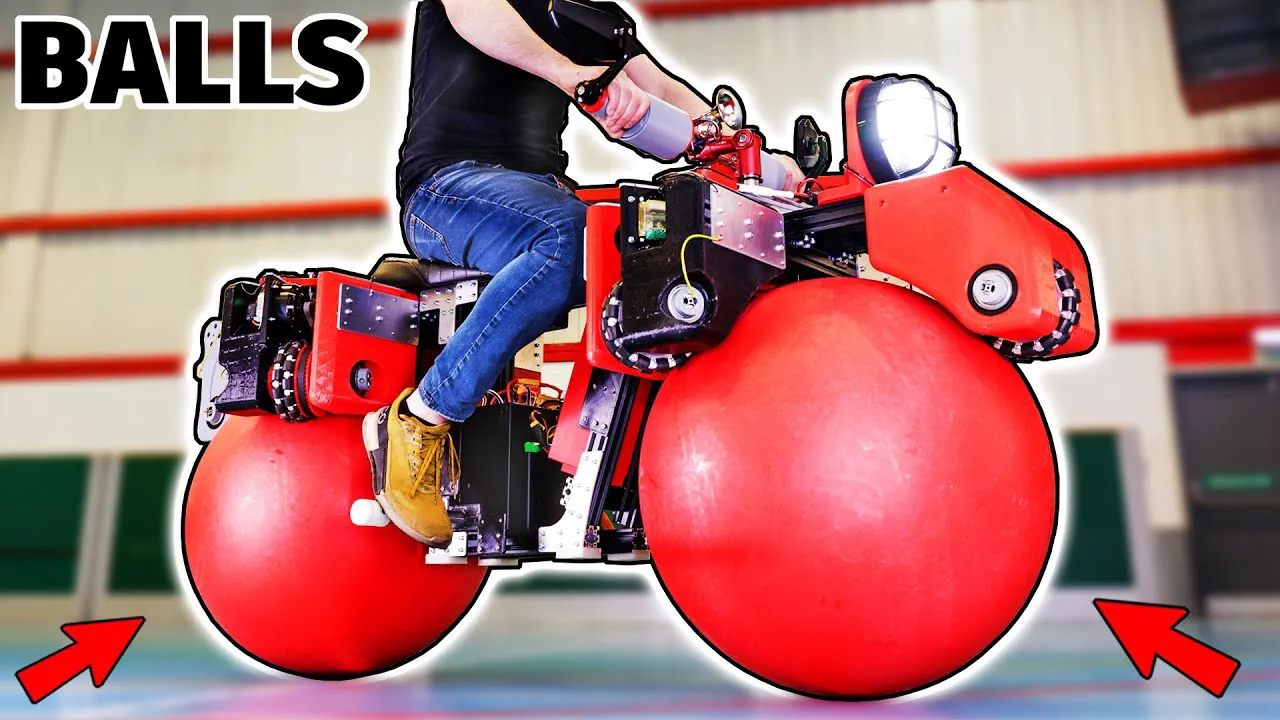
James Bruton’s omnidirectional bike project redefines traditional mobility by introducing a vehicle capable of moving seamlessly in any direction. Balancing on two rigid spheres, or Walking Globes normally used by circus entertainers, this innovative bike design combines advanced engineering, custom components, and innovative electronics to achieve multidirectional movement while maintaining stability.
Imagine a bike that doesn’t just move forward or backward but glides effortlessly in any direction, defying the limitations of traditional two-wheeled designs. From maintaining balance to overcoming traction issues, the journey to bring this idea to life is as fascinating as it is complex. Bruton’s innovative design combines innovative engineering, custom 3D printed parts, and advanced electronics to tackle these challenges head-on. While the process hasn’t been without its hiccups—think slippage, stability concerns, and the occasional design tweak—it’s a testament to how creativity and technology can work together to redefine what’s possible.
Omnidirectional Bike
TL;DR Key Takeaways :
- The omnidirectional bike, designed by James Bruton, uses two rigid spheres powered by omni-wheels to enable seamless multidirectional movement while maintaining stability.
- Its innovative design relies on advanced engineering, including a 4040 T-slot aluminum framework, custom 3D-printed parts, and precise mechanical components like bearings, pulleys, and belts.
- Key electronics include ODrive motor controllers, a Teensy 4.1 microcontroller with an IMU for balance, and custom twist-grip controls for intuitive operation.
- Extensive testing and refinements address challenges such as traction, stability, and turning dynamics, with improvements made to steering mechanisms and PID control parameters.
- Future developments focus on enhancing durability, refining control systems, and expanding testing environments to optimize performance and usability.
How It Works: Concept and Design
At the heart of this unique bike is its ability to balance on two rigid balls, which serve as the primary contact points with the ground. These balls are powered by omni-wheels, allowing them to roll in any direction. This setup allows for multidirectional movement, setting it apart from traditional bicycles that rely on linear motion.
This innovative design, however, introduces several engineering challenges, including:
- Maintaining wheel alignment: Preventing slippage during movement is critical for smooth operation.
- Making sure consistent velocity: Achieving uniform linear speed across all directions requires precise calibration.
- Dynamic balancing: Keeping the bike stable in real-time demands advanced control systems.
Overcoming these obstacles involves meticulous calibration, the use of durable materials, and a deep understanding of mechanical and electronic systems. The result is a bike that not only moves in any direction but also maintains stability and control, even under challenging conditions.
Engineering the Framework
The structural framework of the bike is constructed using 4040 T-slot aluminum extrusions, chosen for their strength, modularity, and adaptability. This material provides a robust yet flexible foundation for mounting components and allows for easy adjustments during the development process. Custom 3D-printed parts are extensively used to create motor mounts and other structural elements, making sure a precise fit tailored to the bike’s unique design.
Key mechanical components include:
- Bearings, pulleys, and belts: These ensure smooth and efficient operation of the bike’s moving parts.
- A motorized back wheel: This addition enhances forward acceleration, complementing the bike’s multidirectional capabilities.
This combination of materials and components ensures the bike is both functional and adaptable, capable of meeting the demands of its unconventional design. The modular nature of the framework also assists future upgrades and refinements.
James Bruton’s Omnidirectional Bike Project

Unlock more potential in designing new projects by reading previous articles we have written.
- 7 Incredible Apps for Designers & Developers : Take Your Projects
- Phi Ruler Golden Ratio ruler set design tools
- Freakbox Project Android TV Box Unveiled For $149
- Awesome portable Macintosh Mini project
- BAD Canvas professional framework for Business Aware Design
- Settah Design N186 Nixie tube watch
- Graphic Design tips and tricks to improve your creations
- Design and build your first custom PCB
- How to Create Realistic and Consistent Characters with Dzine AI
- Ackerman design 3 wheeled electric scooter
Electronics and Control Systems
The bike’s advanced electronics are central to its operation, allowing precise control and stability. These systems work together to ensure the bike responds dynamically to user input and environmental conditions. Key electronic components include:
- ODrive motor controllers: These deliver accurate torque and velocity control to the omni-wheels, allowing smooth multidirectional movement.
- Teensy 4.1 microcontroller: Paired with an Inertial Measurement Unit (IMU), this component monitors balance and motion in real-time.
- Custom twist-grip controls: These provide intuitive input for steering and movement, allowing the rider to navigate effortlessly.
Additionally, the chassis is grounded to prevent static electricity buildup, making sure reliable performance over extended periods. The integration of these advanced systems allows the bike to maintain stability and respond effectively to the rider’s commands, even in complex scenarios.
Testing and Refinements
Extensive testing is a cornerstone of the bike’s development, with each trial providing valuable insights into its performance and areas for improvement. Initial tests focus on balancing and responsiveness, addressing issues such as wheel spin and traction loss. A motorized drive unit is incorporated to enhance forward acceleration, while PID (Proportional-Integral-Derivative) control parameters are fine-tuned to optimize stability.
To improve handling, the team experiments with two distinct steering mechanisms:
- Lean-to-steer: This method involves shifting the rider’s weight to initiate turns, using natural body movements.
- Steer-to-lean: This approach uses the handlebars to control leaning during turns, offering a more traditional steering experience.
These refinements address challenges posed by centrifugal forces during sharp turns, significantly enhancing the bike’s maneuverability. Each iteration brings the design closer to achieving seamless multidirectional movement and intuitive control.
Challenges and Lessons Learned
The development of the omnidirectional bike is not without its challenges. Several key issues arise during the process, including:
- Traction and stability: Maintaining grip on the balls at higher speeds proves difficult, requiring adjustments to the materials and design.
- Wear and tear: Dirt accumulation and material degradation on the balls and wheels impact performance over time, highlighting the need for durable components.
- Turning dynamics: Centrifugal forces during sharp turns necessitate further refinement of the leaning mechanisms to ensure smooth and controlled movement.
These challenges underscore the importance of iterative testing and continuous improvement. Each obstacle provides an opportunity to refine the design, enhancing both functionality and durability.
Future Directions
Looking ahead, the project focuses on several key areas for improvement to bring the bike closer to its full potential as a innovative mobility solution. These include:
- Enhancing durability: Improving the materials used for the balls and wheels to resist wear and dirt accumulation, making sure consistent performance over time.
- Refining control systems: Further optimizing the responsiveness and handling of the bike to make it more intuitive for riders.
- Expanding testing environments: Conducting trials in larger spaces to evaluate the bike’s performance under a wider range of conditions.
These advancements aim to address the remaining challenges and unlock the full potential of the omnidirectional bike, paving the way for its application in real-world scenarios.
Media Credit: James Bruton
Disclosure: Some of our articles include affiliate links. If you buy something through one of these links, Geeky Gadgets may earn an affiliate commission. Learn about our Disclosure Policy.