
MIT Biomimetics Robotics department have been playing with their mini cheetah robots playing football, jumping and frolicking in the leaves. Watch the two-minute video below to see the nine remote-controlled robots in action. Each mini cheetah weights just 20 lbs and was unveiled earlier this year, offering a smaller version of the Cheetah 3. The Cheetah 3 is more expensive, less customisable and is a lot larger than those seen in the video below making it a lot slower and less agile than the bouncy mini cheetah robots.
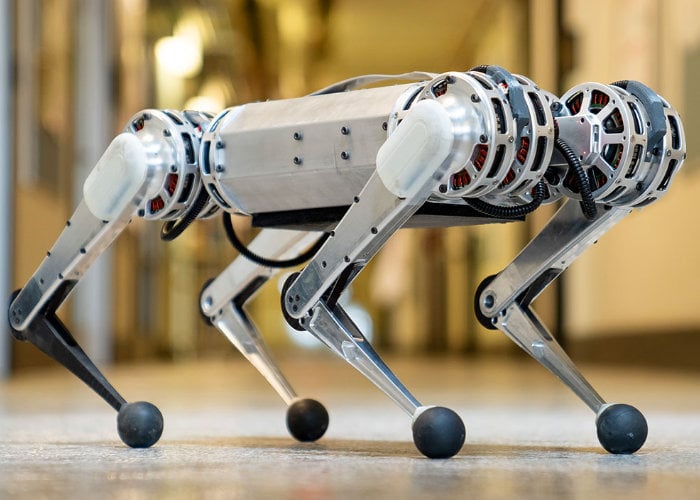

“Mini Cheetah is a small, agile four-legged robot that can run and do backflips. It is robust and has powerful actuators, allowing researchers to perform experiments and test new controllers without fear of breaking the robot. Mechanically robust design that can survive high-impact falls and accidents. Large range of motion at each joint allows operation forwards, backwards, or upside-down. High speed, high torque actuators let the robot perform extremely dynamic maneuvers like backflips. Omnidirectional movement with trotting, pronking, bounding, and pacing gaits.”

“A big part of why we built this robot is that it makes it so easy to experiment and just try crazy things, because the robot is super robust and doesn’t break easily, and if it does break, it’s easy and not very expensive to fix,” says Katz, who worked on the robot in the lab of Sangbae Kim, associate professor of mechanical engineering.
HEIGHT : 30 cm | 11.8 in
LENGTH : 48 cm | 18.9 in
WIDTH : 27 cm | 10.6 in
WEIGHT : 9 kg | 20 lb
SPEED : 8.8 km/h | 5.5 mph (2.45 m/s forwards, 1 m/s sideways, in-place turning at 5 radians per second)
Source:
Disclosure: Some of our articles include affiliate links. If you buy something through one of these links, Geeky Gadgets may earn an affiliate commission. Learn about our Disclosure Policy.